


XI. Étude de cas n° 1 : simulateur GPS▲
XI-A. Fonctionnalités▲
Le but de cette application est de simuler un GPS. Elle de type commande/contrôle (ou dans le jargon utilisé ici télécommande (TC)/télémétrie(TM)).
Ce simulateur est intégré dans un environnement de test qui émule d'autres équipements, ses interfaces sont les suivantes :
- une liaison série RS422 à 9600 bits/s, identique à l'équipement réel (carte PCI Sunix) ;
- trois sockets de communication dialoguant avec l'application principale de conduite de test : contrôle du dialogue et modification des états internes du GPS, enregistrement traces reçues/émises de l'équipement, évènements (journal de bord).
Xenomai a été choisi afin de respecter les temps de réponse de l'équipement et d'avoir une datation précise dans les mesures télémétriques.
La liaison série utilise le driver RTDM fourni avec Xenomai.
XI-B. Architecture dynamique▲
XI-B-1. Schéma▲
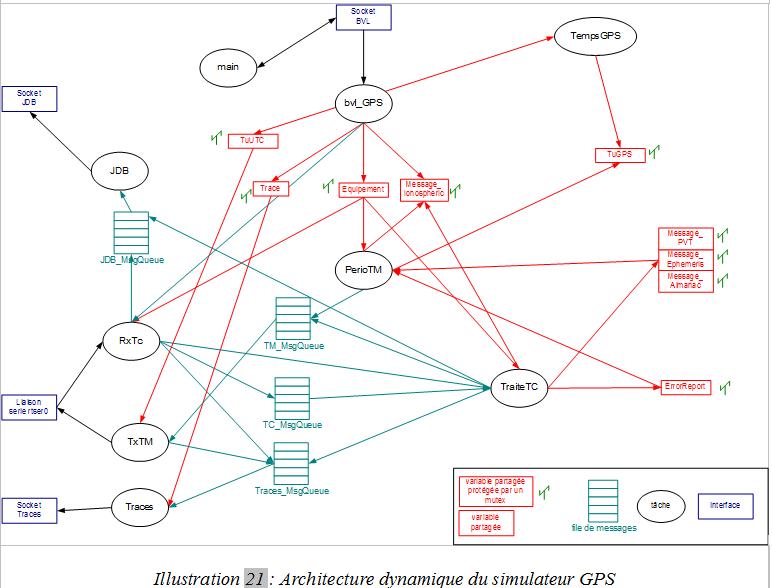
XI-B-2. Justification▲
XI-B-2-a. Tâche TempsGPS▲
Rôle : simule l'horloge de bord de l'équipement.
Priorité : 80.
Justification : émulation d'une horloge matérielle.
Type d'activation : asynchrone, périodique 1 Hz.
Variables globales accédées : TuGPS (protégés par sémaphore).
Mode : primary.
XI-B-2-b. Tâche TxTM▲
Rôle : émet sur le port série les TM générées.
Priorité : 70.
Justification : l'émission des TM est prioritaire sur la génération des TC.
Type d'activation : asynchrone, sur lecture de la file de messages TM_MsgQueue.
Variables globales accédées : TuUTC (protégée par sémaphore).
Mode : primary.
XI-B-2-c. Tâche RxTC▲
Rôle : réceptionne les TC sur le port série.
Priorité : 60
Justification : la réception des TC prime sur leur traitement.
Type d'activation : asynchrone sur réception sur le port série.
Variables globales accédées : Equipement (protégée par sémaphore).
Mode : primary.
XI-B-2-d. Tâche PerioTM▲
Rôle : génère les TM périodiques.
Priorité : 50 (Round-robin).
Justification : les deux tâches de production de TM ont la même priorité. La génération est moins prioritaire que le traitement des E/S.
Type d'activation : asynchrone, périodique 1 Hz.
Variables globales accédées : Equipement (protégée par sémaphore).
Message_Ionospheric (protégée par sémaphore).
Message_Ephemesis (protégée par sémaphore).
Message_PVT (protégée par sémaphore).
Message_Almanac (protégée par sémaphore).
ErrorReport (protégée par sémaphore).
TuGPS (protégée par sémaphore).
Mode : primary.
XI-B-2-e. Tâche TraiteTC▲
Rôle : génère les TM en fonction des TC reçues.
Priorité : 50 (Round-robin).
Justification : les deux tâches de production de TM ont la même priorité. La génération est moins prioritaire que le traitement des E/S.
Type d'activation : asynchrone sur lecture de la file de messages TC_MsgQueue.
Variables globales accédées : Equipement (protégée par sémaphore).
Message_Ionospheric (protégée par sémaphore).
Message_Ephemesis (protégée par sémaphore).
Message_PVT (protégée par sémaphore).
Message_Almanac (protégée par sémaphore).
ErrorReport (protégée par sémaphore).
Mode : primary.
XI-B-2-f. Tâche bvl_GPS▲
Rôle : communication avec la conduite de test (réception des directives).
Priorité : 20.
Justification : aucune contrainte temps réel. On considère que la terminaison de l'essai (réception d'une directive) est prioritaire sur l'émission des traces.
Type d'activation : asynchrone sur réception d'une directive sur le socket (ou déconnexion).
Variables globales accédées : TuUTC (protégée par sémaphore).
Trace (protégée par sémaphore).
Equipement (protégée par sémaphore).
Message_Ionospheric (protégée par sémaphore).
Mode : secondary.
XI-B-2-g. Tâche JDB▲
Rôle : enregistrement d'évènements (réception de directives, changements d'état internes...)
Priorité : 10 (Round-robin).
Justification : aucune contrainte temps réel.
Type d'activation : asynchrone sur lecture de la file de messages JDB_MsgQueue.
Variables globales accédées : aucune.
Mode : secondary.
Il n'y a a priori pas de raison de rendre prioritaire l'enregistrement des événements sur les traces, et vice-versa. C'est pourquoi ces deux tâches ont la même priorité et que le round-robin est activé.
XI-B-2-h. Tâche Traces▲
Rôle : enregistrement des traces.
Priorité : 10 (Round-robin).
Justification : aucune contrainte temps réel.
Type d'activation : asynchrone sur lecture de la file de messages Traces_MsgQueue.
Variables globales accédées : Trace (protégée par sémaphore).
Mode : secondary.
XI-B-2-i. Tâche main▲
Rôle : attendre la terminaison des tâches.
Priorité : 1.
Justification : déroulement sans impact sur les traitements.
Type d'activation : tâche de fond uniquement active au démarrage à l'arrêt.
Variables globales accédées : aucune.
Mode : secondary.
Généralement les tâches logicielles émulant un comportement matériel (timer, génération de signal...) sont les plus prioritaires de l'architecture.
Les tâches identifiées comme « lentes » sont souvent celles qui enregistrent ou affichent des traces.
Lors de l'affectation initiale des priorités, prévoyez large. Plutôt que 1, 2, 3, 4... préférez 10, 20, 30, 40... en cas d'évolution de la spécification (rajout d'une tâche ou changement de priorité), l'impact sera moins lourd.
Pour le type d'activation, on désigne dans ce document par synchrone une tâche dont l'exécution est déterminée par un évènement (sémaphore libéré toutes les secondes par exemple).
Vous devez toujours veiller à ce que les tâches se terminent proprement. Des problèmes de terminaison indiquent parfois des erreurs de codage.
- par des sémaphores d'exclusion mutuelle ;
- par les priorités, à condition que les tâches soient synchrones, c'est-à-dire que l'on maîtrise toujours leur date d'exécution.
XI-B-2-j. Files de messages▲
Les files de messages sont utilisées pour que des tâches de priorités différentes puissent communiquer.
Dans la mesure du possible, le dimensionnement de chaque file doit être justifié. Cependant, dans la pratique, on considère souvent une taille maximale qui ne sera jamais atteinte.